El siguiente es el extracto final de mi nuevo libro, "Historias increíbles desde el espacio: una mirada detrás de escena de las misiones que cambian nuestra visión del cosmos". El libro es una mirada interna a varias misiones robóticas actuales de la NASA, y este extracto es la parte 3 de 3 publicada aquí en la revista Space, del Capítulo 2, "Roving Mars with Curiosity". Puedes leer la Parte 1 aquí, y la Parte 2 aquí. El libro está disponible en forma impresa o e-book (Kindle o Nook) Amazon y Barnes & Noble.
Cómo conducir un Mars Rover
¿Cómo sabe Curiosity dónde y cómo conducir a través de la superficie de Marte? Puede imaginar ingenieros en JPL utilizando joysticks, similares a los utilizados para juguetes de control remoto o videojuegos. Pero a diferencia de la conducción RC o los juegos, los controladores del rover Mars no tienen entradas visuales inmediatas o una pantalla de video para ver a dónde va el rover. Y al igual que en el aterrizaje, siempre hay un retraso de tiempo cuando se envía un comando al rover y cuando se recibe en Marte.
"No está conduciendo en un sentido interactivo en tiempo real debido al retraso", explicó John Michael Morookian, quien lidera el equipo de conductores de rover.
El título de trabajo real de Morookian y su equipo son "Planificadores Rover", que describe con precisión lo que hacen. En lugar de "conducir" los rovers per se; planifican la ruta por adelantado, programan software especializado y cargan las instrucciones en Curiosity.
"Utilizamos imágenes tomadas por el rover de sus alrededores", dijo Morookian. “Tenemos un conjunto de imágenes estéreo de cuatro cámaras de navegación en blanco y negro, junto con imágenes de Hazcams (cámaras de prevención de riesgos), respaldadas por imágenes en color de alta resolución de MastCam que nos brindan detalles sobre la naturaleza del terreno adelante y pistas sobre tipos de rocas y minerales en el sitio. Esto ayuda a identificar estructuras que parecen interesantes para los científicos ".
Utilizando todos los datos disponibles, pueden crear una visualización tridimensional del terreno con un software especializado llamado Programa de secuenciación y visualización de Rover (RSVP).
"Esto es básicamente un simulador de Marte y colocamos una Curiosidad simulada en un panorama de la escena para visualizar cómo el rover podría atravesar su camino", explicó Morookian. “También podemos ponernos gafas estéreo, que permiten que nuestros ojos vean la escena en tres dimensiones como si estuviéramos allí con el rover.
En la realidad virtual, los conductores del rover pueden manipular la escena y el rover para probar cada posibilidad de cuáles rutas son las mejores y qué áreas evitar. Allí, pueden cometer todos los errores (quedar atrapados en una duna, inclinar el vehículo, chocar contra una gran roca, salir de un precipicio) y perfeccionar la secuencia de conducción mientras el vehículo real permanece seguro en Marte.
“Los científicos también revisan las imágenes en busca de características interesantes y consultan con los Rover Planners para ayudar a definir un camino. Luego componimos los comandos detallados que son necesarios para obtener la Curiosidad del Punto A al Punto B a lo largo de ese camino ”, dijo Morookian. "" También podemos incorporar los comandos necesarios para dar la dirección del rover para hacer contacto con el sitio utilizando su brazo robótico ".

Entonces, todas las noches se le ordena al rover que se apague durante ocho horas para recargar sus baterías con el generador nuclear. Pero primero Curiosity envía datos a la Tierra, incluidas imágenes del terreno y cualquier información científica. En la Tierra, los Planificadores Rover toman esos datos, hacen su trabajo de planificación, completan la programación del software y envían la información a Marte. Luego, Curiosity se despierta, descarga las instrucciones y se pone a trabajar. Y el ciclo se repite.
Curiosity también tiene una función AutoNav que le permite al rover atravesar áreas que el equipo aún no ha visto en las imágenes. Por lo tanto, podría pasar la colina y descender por el otro lado a un territorio desconocido, con el AutoNav detectando posibles peligros.
"No lo usamos con demasiada frecuencia porque es computacionalmente costoso, lo que significa que el rover tarda mucho más en operar en ese modo", dijo Morookian. "A menudo encontramos que es un mejor intercambio venir al día siguiente, mirar las imágenes y conducir lo más lejos que podamos".

Cuando Morookian me mostró las diversas salas utilizadas por los equipos de planificación móvil en JPL, me explicó cómo deben operar en diferentes escalas temporales.
"No solo tenemos la planificación diaria de la ruta", dijo, "sino que también hacemos una planificación estratégica de largo alcance utilizando imágenes orbitales de la cámara HiRISE en el Mars Reconnaissance Orbiter y elegimos rutas basadas en características vistas desde la órbita". Nuestro equipo trabaja estratégicamente, buscando muchos meses para definir los mejores caminos ".
Otro proceso llamado Supra-Tactical se centra solo en la próxima semana. Esto implica que los planificadores científicos manejen y refinen los tipos de actividades que el rover realizará en el corto plazo. Además, dado que ya nadie en el equipo vive en Mars Time, los viernes los Rover Planners elaboran los planes durante varios días.
"Dado que no trabajamos los fines de semana, los planes del viernes contienen múltiples soles de actividades", dijo Morookian. "Dos equipos paralelos deciden qué días conducirá el rover y qué días realizará otras actividades, como trabajar con el brazo robótico u otros instrumentos".
Sin embargo, se monitorean los datos que provienen del rover durante el fin de semana, y si hay un problema, se llama a un equipo para hacer una evaluación más detallada. Morookian indicó que tuvieron que comprometerse varias veces con el equipo de emergencia del fin de semana, pero hasta ahora no ha habido problemas serios. "Sin embargo, nos mantiene alerta", dijo.
El rover presenta una serie de controles de seguridad reactivos sobre la cantidad de inclinación general de la plataforma del rover y la articulación del sistema de suspensión de las ruedas, por lo que si el rover está pasando sobre un objeto que es demasiado grande, se detendrá automáticamente.
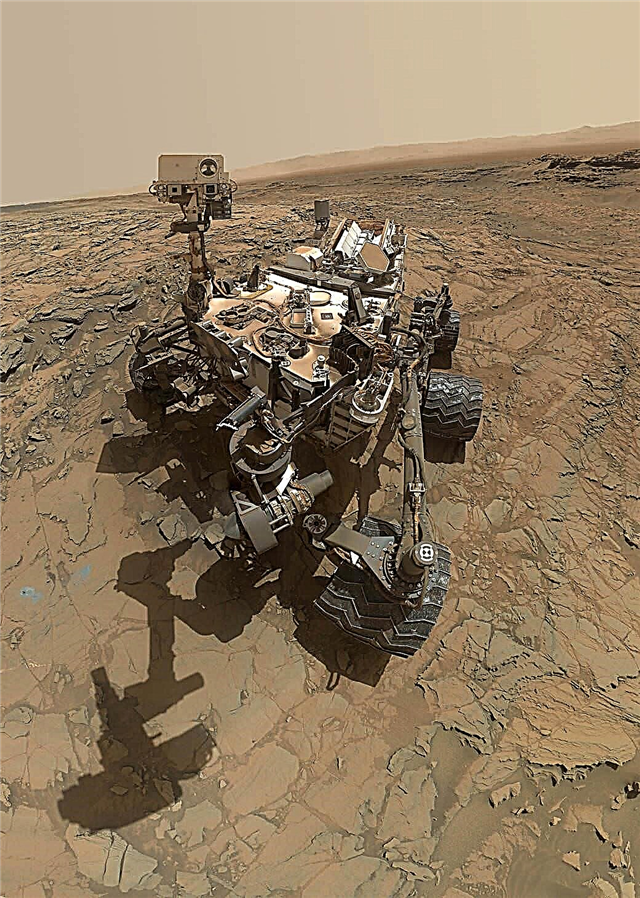
La curiosidad no fue creada para la velocidad. Fue diseñado para viajar hasta 660 pies (200 metros) en un día, pero rara vez viaja tan lejos en un Sol. A principios de 2016, el rover había recorrido un total de aproximadamente 7.5 millas (12 km) a través de la superficie de Marte.

Hay varias maneras de determinar qué tan lejos ha viajado Curiosity, pero la medición más precisa se llama 'Odometría visual'. Curiosity tiene agujeros especializados en sus ruedas en forma de letras de código Morse, que deletrean 'JPL' - un guiño a la página de inicio de los equipos de ciencia e ingeniería del rover, en todo el territorio marciano.
"La odometría visual funciona comparando el par más reciente de imágenes estéreo recopiladas aproximadamente cada metro sobre el disco", dijo Morookian. “Las características individuales de la escena se combinan y rastrean para proporcionar una medida de cómo la cámara (y, por lo tanto, el rover) se ha traducido y girado en un espacio tridimensional entre las dos imágenes y nos dice en un sentido muy real qué tan lejos ha llegado la curiosidad . "
Una inspección cuidadosa de las pistas de rover puede revelar el tipo de tracción que tienen las ruedas y si han resbalado, por ejemplo, debido a las altas pendientes o al suelo arenoso.
Desafortunadamente, Curiosity ahora tiene nuevos agujeros en sus ruedas que no se supone que estén allí.
Problemas con el móvil
Morookian y el científico del proyecto Ashwin Vasavada expresaron alivio y satisfacción de que, en general, hasta aquí en la misión, Curiosity es un rover bastante saludable. Actualmente, toda la carga útil de la ciencia está funcionando a una capacidad casi completa. Pero el equipo de ingeniería vigila algunos problemas.
"Alrededor del sol 400, nos dimos cuenta de que las ruedas se desgastaban más rápido de lo que esperábamos", dijo Vasavada.

Y el desgaste no consistía en pequeños agujeros; El equipo comenzó a ver pinchazos y lágrimas desagradables. Los ingenieros se dieron cuenta de que los agujeros estaban siendo creados por las rocas duras y dentadas que el rover estaba conduciendo durante ese tiempo.
"No esperábamos completamente el tipo de rocas" puntiagudas "que estaban haciendo daño", dijo Vasavada. “También hicimos algunas pruebas y vimos cómo una rueda podía empujar a otra rueda contra una roca, empeorando el daño. Ahora manejamos con más cuidado y no manejamos tanto como lo hemos hecho en el pasado. Hemos podido nivelar el daño a una tasa más aceptable ".
Al principio de la misión, la computadora de Curiosity entró en "modo seguro" varias veces, ya que el software de Curiosity reconoció un problema, y la respuesta fue no permitir más actividades y llamar a casa.
El software especializado de protección contra fallas se ejecuta en todos los módulos e instrumentos, y cuando ocurre un problema, el móvil se detiene y envía datos llamados "registros de eventos" a la Tierra. Los registros incluyen varias categorías de urgencia, y a principios de 2015, el rover envió un mensaje que esencialmente decía: "Esto es muy, muy malo". El taladro en el brazo del vehículo experimentó una fluctuación en una corriente eléctrica, como un cortocircuito.
"El software de Curiosity tiene la capacidad de detectar cortocircuitos, como el interruptor de circuito de falla a tierra que tiene en su baño", explicó Morookian, "excepto que este le dice" esto es muy, muy malo "en lugar de simplemente darle una luz amarilla".
Como el equipo no puede ir a Marte y reparar un problema, todo se soluciona enviando actualizaciones de software al móvil o cambiando los procedimientos operativos.

"Ahora somos más cuidadosos con la forma en que usamos el taladro", dijo Vasavada, "y no perforamos con toda su fuerza al principio, sino que aumentamos lentamente. Es algo así como la forma en que conducimos ahora, más cauteloso, pero aún así hace el trabajo. Hasta el momento no ha tenido un gran impacto ".
Un toque más ligero en el taladro también fue necesario para las piedras de barro y areniscas más suaves que encontró el rover. Morookian dijo que había preocupación de que las rocas en capas no pudieran sostenerse bajo el asalto del protocolo de perforación estándar, por lo que ajustaron la técnica para usar las "configuraciones" más bajas que aún permiten que el taladro avance lo suficiente en la roca.
Pero las oportunidades para usar el ejercicio aumentan a medida que Curiosity comienza a atravesar la montaña. El rover está viajando a través de lo que Vasavada llama un "área rica en objetivos, muy interesante", mientras el equipo científico trabaja para unir el contexto geológico de todo lo que están viendo en las imágenes.
Encontrar el equilibrio en Marte
Si bien la diversión en Yellowknife Bay permitió al equipo hacer algunos descubrimientos importantes, sintieron presión para llegar al monte. Sharp, así que "condujo como el infierno durante un año", dijo Vasavada.
Ahora en la montaña, todavía existe la presión de aprovechar al máximo la misión, con el objetivo de atravesar al menos cuatro unidades de roca diferentes, o capas, en el monte. Agudo. Cada capa podría ser como un capítulo en el libro de la historia de Marte.

“Explorando el monte. Sharp es fascinante ", dijo Vasavada," y estamos tratando de mantener una mezcla entre descubrimientos realmente grandiosos, lo cual, odias decir, nos ralentiza y subimos más en la montaña. Mirar de cerca una roca frente a ti significa que nunca podrás ir y mirar esa otra roca interesante que está allí ".
Vasavada y Morookian dijeron que es un desafío preservar ese equilibrio todos los días: encontrar lo que se llama "rodilla en la curva" o "punto óptimo" de la optimización perfecta entre conducir y detenerse para la ciencia.
Luego está el equilibrio entre detenerse para hacer una observación completa con todos los instrumentos y hacer "ciencia de sobrevuelo" donde se realizan observaciones menos intensas.
"Tomamos las observaciones que podemos y generamos todas las hipótesis que podemos en tiempo real", dijo Vasavada. "Incluso si nos quedan 100 preguntas abiertas, sabemos que podemos responder las preguntas más adelante siempre y cuando sepamos que hemos tomado suficientes datos".
El objetivo principal de Curiosity no es la cumbre, sino una región a unos 1.330 pies (400 metros) de altura donde los geólogos esperan encontrar el límite entre las rocas que vieron mucha agua en su historia y las que no. Ese límite proporcionará información sobre la transición de Marte de un planeta húmedo a seco, llenando un vacío clave en la comprensión de la historia del planeta.

Nadie sabe realmente cuánto durará la curiosidad, o si sorprenderá a todos, como sus predecesores Spirit y Opportunity. Después de haber superado la "misión principal" de un año en Marte (dos años terrestres), y ahora en la misión extendida, la única gran variable es la fuente de energía RTG. Si bien el poder disponible comenzará a disminuir constantemente, tanto Vasavada como Morookian no esperan que eso sea un problema durante al menos cuatro años terrestres más, y con el "cuidado" correcto, el poder podría durar una docena de años o más.
Pero también saben que no hay forma de predecir cuánto durará la curiosidad o qué evento inesperado podría terminar la misión.
La bestia
¿Curiosity tiene una personalidad como los rovers anteriores de Marte?
"En realidad no, no parecemos antropomorfizar este rover como lo hizo la gente con Spirit and Opportunity", dijo Vasavada. "No nos hemos unido emocionalmente con eso. Los sociólogos realmente han estado estudiando esto ". Sacudió la cabeza con una sonrisa divertida.
Vasavada indicó que podría tener algo que ver con el tamaño de Curiosity.
"Lo considero una bestia gigante", dijo con la cara seria. "Pero no de una manera mala".

Lo que ha llegado a caracterizar esta misión, dijo Vasavada, es la complejidad de la misma, en todas las dimensiones: el componente humano de lograr que 500 personas trabajen y cooperen juntas mientras se optimizan los talentos de todos; mantener el rover seguro y saludable; y mantener diez instrumentos en funcionamiento todos los días, que a veces realizan tareas científicas completamente ajenas.
"Todos los días son nuestros pequeños‘ siete minutos de terror ", donde muchas cosas tienen que ir bien todos los días", dijo Vasavada. “Hay un millón de posibles problemas e interacciones, y tienes que estar constantemente pensando en todas las formas en que las cosas pueden salir mal, porque hay un millón de formas en que puedes equivocarte. Es un baile complejo, pero afortunadamente tenemos un gran equipo ".
Luego agregó con una sonrisa: "Sin embargo, esta misión es emocionante, incluso si es una bestia".
Page Street Publishing, una subsidiaria de Macmillan, publica “Historias increíbles desde el espacio: una mirada detrás de escena de las misiones que cambian nuestra visión del cosmos”.